XPLANNER
Práctico e intuitivo: para planificar sobre el terreno o en la oficina
XPlanner es el software de planificación de misiones para aeronaves exclusivo de Xmobots. La plataforma consiste en un sistema de información geográfica (SIG) en el que el usuario especifica el tipo de misión, el modelo de aeronave, la cámara utilizada, el tipo de operación y la zona de interés. A partir de esta información, XPlanner realiza los cálculos necesarios y crea los planes de vuelo del dron para llevar a cabo las misiones. Uno de sus grandes diferenciales es la función "multipolígono", en la que, en un mismo plan de vuelo, el piloto puede sobrevolar diferentes áreas de forma práctica e inteligente.
Vuelo inteligente
Uno de sus grandes diferenciales es la función "multipolígono", en la que, en un mismo plan de vuelo, el piloto puede sobrevolar diferentes zonas de forma práctica e inteligente.
Agilidad en las misiones
Con una interfaz amigable e intuitiva, así como opciones preconfiguradas para la mayoría de las aplicaciones, el software se ha desarrollado para que los usuarios puedan crear misiones sobre el terreno o en la oficina con la rapidez y agilidad que requiere cada vez más el trabajo diario.
Misiones rápidas y seguras en sólo 5 pasos:
01.
Sólo XPlanner tiene una planificación orientada al producto final.
Cualquiera que haya estado involucrado en el mundo de los drones sabe lo importante que es planificar un vuelo con los parámetros correctos. Errores en la GSD (Ground Sample Distance), el solapamiento y el sensor pueden invalidar por completo un trabajo, causando daños importantes en la operación. Cuanto más experimentado sea el piloto, menos probabilidades habrá de que se produzcan estos errores. Pero, ¿qué ocurre con los que se inician en esta tecnología?
Para ayudar a este público cada vez más numeroso, el primer paso de XPlanner en el menú "Asistente" es "Tipo de misión", una función que ofrece patrones de vuelo predefinidos para diferentes aplicaciones. De este modo, el usuario tiene la opción de introducir manualmente estos parámetros (eligiendo GSD y solapamiento) u optar por los ajustes de vuelo predeterminados en el software. Una forma sencilla y práctica de obtener siempre el mejor producto.
Aplicaciones con parámetros de vuelo predefinidos en XPlanner:
Agricultura
Caña de azúcar - línea y falla
Agricultura
Soja - Deficiencia nutricional
Silvicultura
Contar árboles
Ganadería
Ganado - Recuento de individuos
Topografía
Estudio planialtimétrico

02.
¿Qué dron maneja?
Cada dron de Xmobots tiene sus propias especificaciones de autonomía, alcance y carga útil. Por eso, al planificar el vuelo, XPlanner pide al piloto que indique qué aeronave y versión va a utilizar en la operación, para poder optimizar la misión en función de las características del dron.
03.
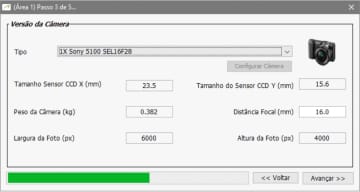
Elija su cámara
¿Está realizando vuelos RGB o multiespectrales? Dado que se trata de parámetros de misión diferentes, la elección de la cámara adecuada permite a XPlanner realizar los cálculos correctos para cada tipo de sensor. De este modo, el piloto acierta siempre, generando productos de calidad que pueden satisfacer las expectativas del cliente.
04.
¿Volará VLOS, EVLOS o BVLOS?
Xmobots es la única empresa en Brasil con drones autorizados por la ANAC para volar por encima de los 400 pies. El uso del espacio aéreo requiere responsabilidad y seriedad, respetando siempre las normas de la ANAC y DECEA. Es por eso que el Paso 4 del menú del Asistente es precisamente la elección del Tipo de Operación que se llevará a cabo:
VLOS (línea visual de visión)
EVLOS (Línea de visión extendida)
BVLOS (Más allá de la línea de visión)

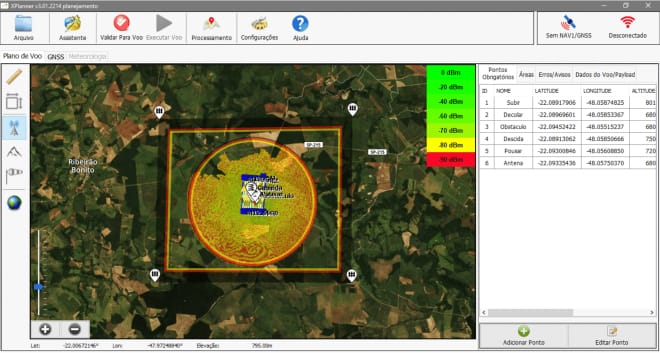
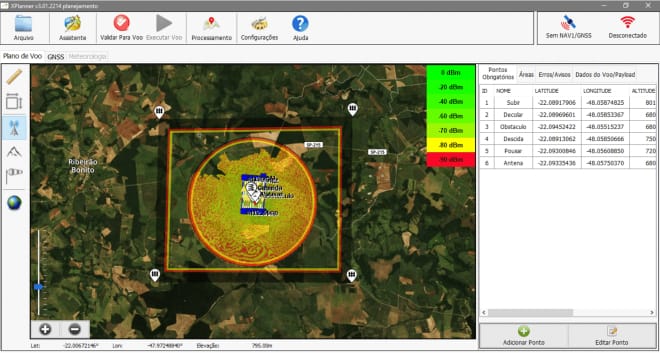
En función del tipo de operación elegida, XPlanner crea una zona de amortiguación visual exterior en los colores amarillo, rojo y negro, desde el interior hacia el exterior:

Zona amarilla
Activación de la alerta electrónica de violación de la valla.
Zona roja
La alerta de violación de la valla electrónica hace que el dron se recupere automáticamente y vuelva a tierra.
Zona negra
Cuando el dron entra en esta zona, se activa la recuperación automática de la finalización del vuelo mediante el despliegue del paracaídas.
05.
Definición de la zona cartografiada y de los parámetros cartográficos
Aquí el operador puede dibujar el polígono cartográfico o cargar un archivo ".KML", así como definir el ángulo (dirección cardinal de las líneas), el búfer, la altura de vuelo y el intercalado de líneas (si lo desea).
El piloto también puede configurar las opciones de Datos del Terreno, eligiendo "Elevación de Pista" (altura constante sobre el suelo), "Elevación Media" (el sistema establece una elevación media de referencia para el terreno) y "Elevación Manual".
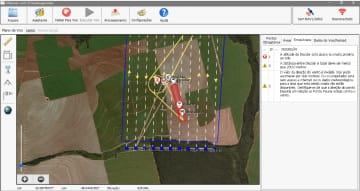
Después de insertar el área cartográfica, XPlanner crea automáticamente algunos waypoints obligatorios. Estos son: Ascenso, Despegue, Obstáculo, Descenso y Aterrizaje.
Validación inteligente
Una vez creado el proyecto/plan de vuelo, XPlanner dispone de una función inteligente para validar la misión antes de cargarla en el dron. Si hay errores en el plan de vuelo, el usuario puede repararlos antes de continuar con el vuelo. Esto es fiabilidad y seguridad, marcas registradas de Xmobots.
XPLANNER
Ver también
AMS7G
- Sistema de aviónica de séptima generación de la plataforma FW7 Tecnología central del Nauru 100D para vuelos más estables, seguros e inteligentes...

XPR
- Informes avanzados para decisiones precisas. XPR de Xmobots es un software que concentra y conecta todos los datos generados por la aeronave con la información definida en la misión, ofreciendo una visión completa e integrada del resultado de la operación...

GCS Portátiles
- La Estación de Control Terrestre (GCS) es el centro operativo de los ARP Xmobots, donde se concentran las funciones esenciales de mando y control; a través de ella, el piloto controla la aeronave, supervisa la telemetría en tiempo real y gestiona las diferentes cargas útiles embarcadas.

GCS319A
- La GCS (Ground Control Station) es la estación de control integrada al sistema Shelter que conecta al operador con los drones y sus cargas útiles, como el cardán y el radar, ofreciendo un funcionamiento seguro, eficiente y ergonómico, ideal para misiones de larga duración...
GDT
- El GDT es el terminal responsable de crear el enlace de comunicación punto a punto entre el ARP y el GCS. Es el que garantiza el intercambio seguro y continuo de comandos, telemetría y datos de carga útil durante toda la misión...

XCOCKPIT
- XCOCKPIT es un software completo para operar y supervisar drones, que ofrece control en tiempo real y análisis de datos detallados para una gestión eficaz y segura de las misiones.

SIS 031A
- Maximice su poder de acción con el sensor SIS031A, la tecnología que transforma la visión en estrategia e inteligencia. Con seguimiento avanzado de múltiples objetivos, cálculo de distancias en tiempo real e identificación precisa, tendrá un control total...

XSIS
- Director
- XSIS Manager es un sistema integrado de supervisión del aire que ofrece una seguridad y precisión excepcionales en operaciones críticas, ideal para zonas que requieren una vigilancia continua y detallada.