Xmobots apresenta o programa “Xmobots Vision”, uma nova era da mobilidade aérea que vai além do “carro voador”
Durante mais de um século, a aviação foi construída sobre a presença de pilotos humanos. Nas próximas décadas, esse paradigma tende a evoluir à medida que sistemas autônomos e inteligência artificial assumem papel central na operação das aeronaves. A Xmobots apresenta o “Xmobots Vision”, a visão de futuro da companhia para um cenário em que a mobilidade aérea se torne pessoal, acessível e integrada ao cotidiano das pessoas e das empresas.
- Acesse a página oficial do “Xmobots Vision clicando aqui!
A iniciativa representa o desenvolvimento de uma nova geração de plataformas aéreas autônomas, capazes de transportar passageiros e cargas de forma regional, ponto a ponto, sem depender de aeroportos ou infraestrutura dedicada.
Mais do que uma nova aeronave, o programa propõe um sistema tecnológico altamente integrado, que reúne:
- A plataforma aérea;
- Sistemas aviônicos (gerenciamento, navegação, controle, comunicações, sensoriamento e atuações);
- Sistema de gerenciamento de tráfego UTM.
Mas principalmente inclui o estado da arte em:
- Inteligência artificial embarcada que monitora os sistemas internos;
- Inteligência artificial embarcada que monitora o ambiente.
Essa integração tecnológica é o que permitirá tornar a mobilidade aérea escalável e economicamente viável.

“A Xmobots vem desenvolvendo todo o ecossistema viabilizador da tecnologia autônoma desde 2011, e hoje atingimos o CDR — Critical Design Review — marco em que os principais parâmetros de engenharia convergem e permitem avançar para a próxima etapa do programa, a produção do protótipo”, destaca o Fundador e CEO da Xmobots, Giovani Amianti.
Uma nova lógica para mobilidade aérea
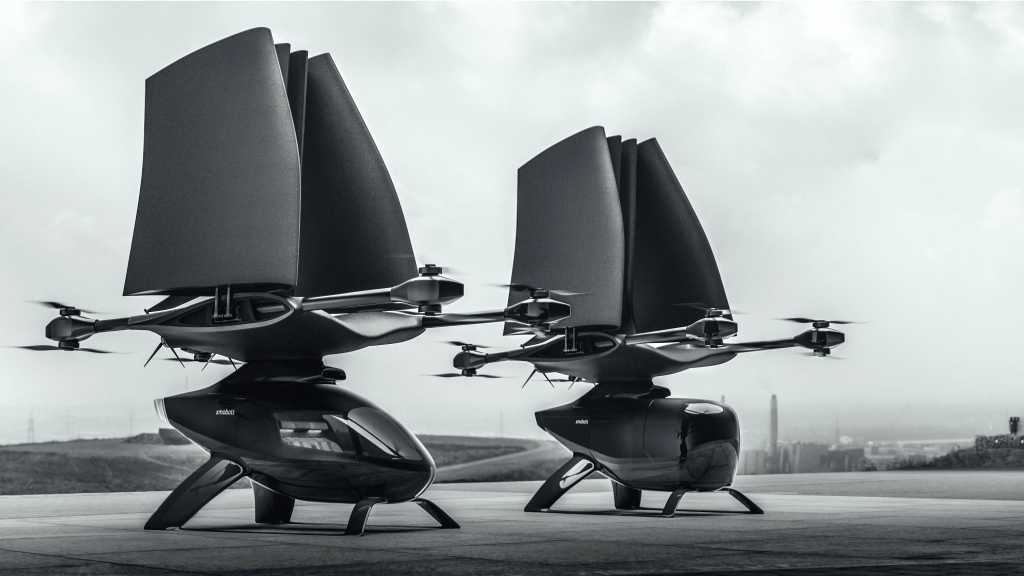
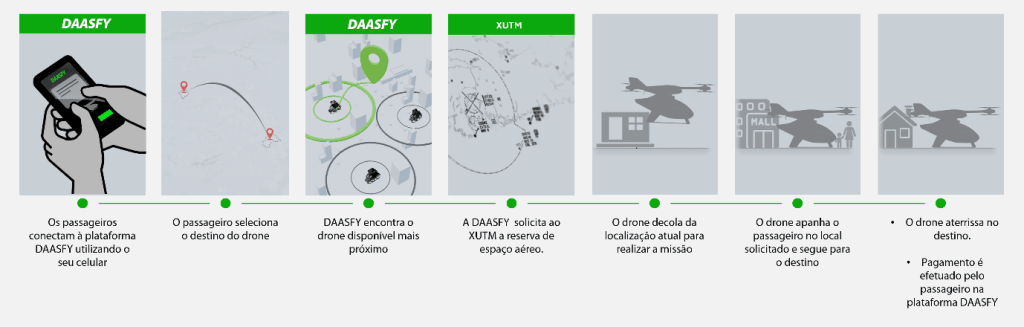
O “Xmobots Vision” projeta um cenário em que deslocamentos aéreos privados de curta e média distância possam ocorrer porta a porta, definidos diretamente pelo usuário por meio de aplicativo.
A proposta prevê transporte de até dois passageiros com bagagem de mão, sem compartilhamento, em rotas definidas conforme a necessidade do usuário.
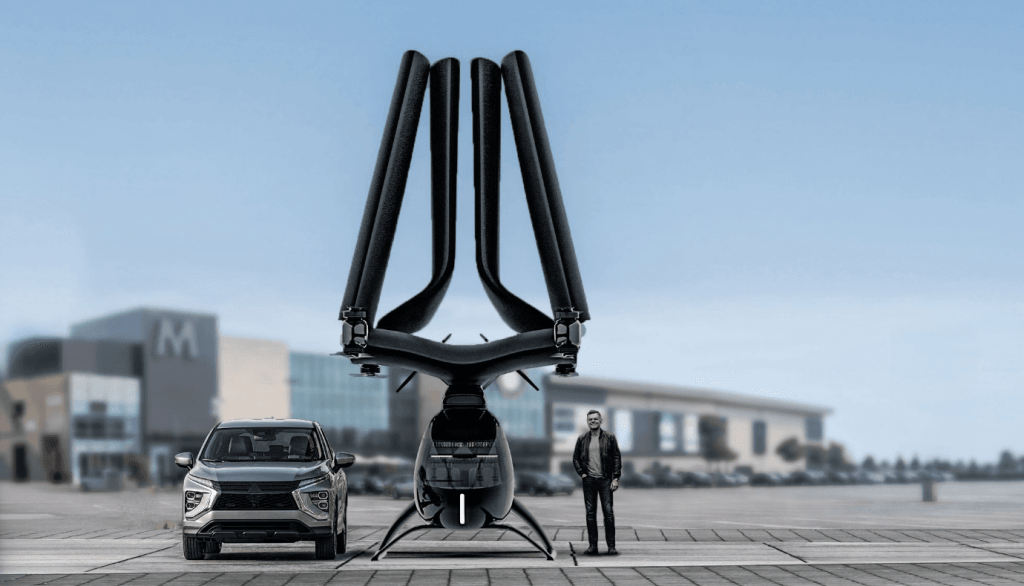
Com alcance de até 300 km em aproximadamente duas horas, a plataforma aérea foi concebida com fuselagem compacta, asas dobráveis e rotores elevados, permitindo operar em áreas urbanas comuns — como estacionamentos ou áreas abertas — sem a necessidade de infraestrutura dedicada.


“Pensar nas pessoas que vivem no interior do Brasil, onde as distâncias entre cidades são grandes e o tempo de deslocamento é elevado, nos inspirou a investigar uma solução capaz de reduzir drasticamente esse tempo”, afirma Daniel Vicentini Lelis, Gerente de Design de Produto da Xmobots.
Segundo ele, a proposta é permitir deslocamentos rápidos para diversas necessidades do cotidiano — desde compromissos de negócios até acesso a serviços essenciais como saúde ou educação.

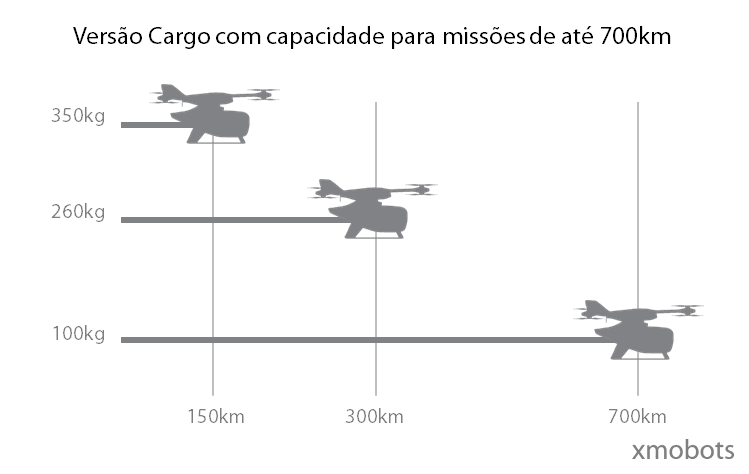
Em períodos de menor demanda por passageiros, como madrugada, “Xmobots Vision” prevê que a estrutura deve ser empregada no transporte de cargas, acelerando o retorno de investimento, permitindo a troca prematura de frota, mantendo a mesma tecnologicamente atualizada, acompanhando a rápida evolução da robótica autônoma.

Essa versatilidade, associada a toda inteligência embarcada, possibilitará a introdução do modelo RaaS (Robot-as-a-Service) no mercado, transformando a esta nova fronteira tecnológica em um serviço acessível e escalável de mobilidade aérea.
Mobilidade regional: um mercado pouco explorado
Grande parte das iniciativas de mobilidade aérea avançada concentra esforços em deslocamentos urbanos curtos (20–50 km), geralmente entre aeroportos e centros de grandes metrópoles (geralmente com mais de 1 a 3 milhões de habitantes).
A Xmobots adota uma abordagem diferente: conectar regiões economicamente relevantes, como agro, florestal, mineração, energia, óleo e gás e offshore, mas que enfrentam insegurança ou limitações estruturais em vias terrestres.
“A proposta é substituir a distância, isolamento e ineficiência terrestre por tempo. No Brasil, por exemplo, 46% do PIB está localizado fora de regiões metropolitanas, impulsionado sobretudo pelo agronegócio”, explica Amianti.


Um desafio global
O problema da mobilidade regional não é exclusivo do Brasil. Situações semelhantes podem ser observadas em diversas regiões do mundo, como:
- Midwest e Great Plains, nos Estados Unidos;
- Interior da Austrália;
- Pampa argentino;
- Norte do México.
Países como Canadá, por exemplo, enfrentam desafios significativos de mobilidade regional devido à grande distância entre cidades e à limitada infraestrutura de transporte.
Já na África, países como África do Sul, Quênia, Namíbia, Botswana e Nigéria possuem alta demanda de mobilidade corporativa e as grandes distancias e estradas precárias ou inseguras tornando o transporte terrestre lento e perigoso.

Organizações internacionais como OCDE e Banco Mundial, que usam o Rural Access Index como proxy de acesso rural a vias trafegáveis o ano todo, reconhecem essa limitação como um desafio estrutural de desenvolvimento.
Nesse contexto, soluções de mobilidade aérea distribuída têm potencial para se tornar um novo modal de transporte.
O mercado
Conforme pode-se observar abaixo, a demanda por solução equivalente é latente em países nos cinco continentes.
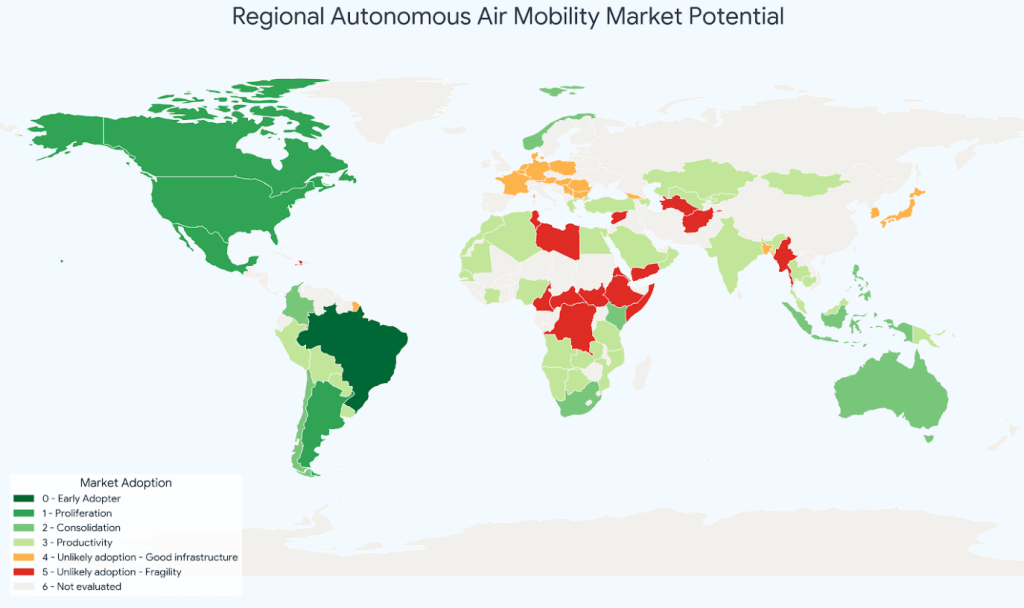
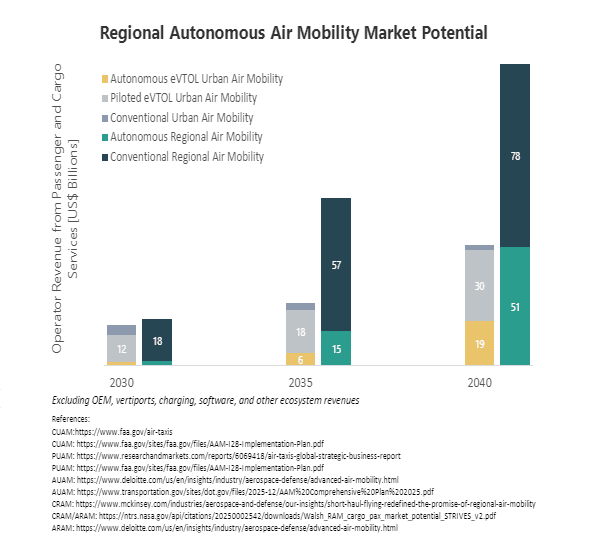
As primeiras aplicações economicamente relevantes da mobilidade aérea autônoma regional distribuída deve ocorrer em 2030 para transporte de carga e 2034 para transporte de pessoas, devendo atingir um mercado de US$ 15 Bilhões em 2035, crescendo rapidamente para US$ 51 Bilhões em 2040.
Com base em análises de mercados, estima-se que o mercado de mobilidade aérea regional seja 150% superior à mobilidade aérea urbana, demonstrando o grande potencial de crescimento nas próximas décadas, devendo chegar a mais de US$ 130 bilhões em 2040.
A tecnologia
A maioria das tecnologias de mobilidade aérea avançada em desenvolvimento focam em transporte de 5 a 7 passageiros, o que resultam em aeronaves de volume que impede a operação sem uma estrutura preparada como vertiport, heliponto ou aeroporto.
Por outro lado, estudos indicam que a média de pessoas que transitam em carros é de 1,6, então uma solução que transporte 2 passageiros atenderá mais de 95% do mercado potencial.
Além de 2 passageiros, o programa “Xmobots Vision” é projetado com foco em atender o requisito de alcance de centenas de quilômetros (distância percorrida) inerente à mobilidade regional.
Para tanto adotou-se uma tecnologia de energia híbrida, elétrico-combustão, onde decolagem, cruzeiro e pouso são propulsados por motores elétricos customizados, projetados pelo parceiro de projeto Imobras Motores Elétricos e para compensar a limitação tecnológica da densidade energética de baterias (que hoje é de aproximadamente 300wh/kg), nosso parceiro de projeto Giaffone Electric projetou um gerador embarcado de alto desempenho que entrega densidade energética do sistema acima de 1050wh/kg. Além disso, o gerador pode rodar a etanol, permitindo pegada neutra de carbono.
Além de transportar passageiros por centenas de km, o programa enfrentou um grande desafio que é viabilizar a operação onde qualquer carro opere, ou seja, decolar e pousar de ruas, bem como poder estacionar em uma vaga de estacionamento padronizada. A tecnologia da asa que dobra, os propulsores VTOL elevados, são todos soluções de projeto para atender esse requisito de ocupar uma vaga.
Além disso, por não demandar estrutura preparada para carregamento de bateria, a tecnologia prevê margem para ir até o posto de combustível mais próximo e abastecer.

No posto, e o frentista saca a mangueira de abastecimento do drone e conecta à bomba de abastecimento padrão de carros mais próxima.
Nas regiões de operação teremos uma rede credenciada de postos onde será abastecido e estacionado a aeronave.

Viabilizar mobilidade aérea autônoma exige muito mais do que desenvolver uma aeronave. É necessário dominar uma pilha tecnológica completa.
Poucos países no mundo possuem capacidade de desenvolver essa base tecnológica de forma integrada.
Na Xmobots, essa tecnologia foi desenvolvida internamente ao longo de duas décadas.
O sistema inclui:
Aviônicos e sistemas da plataforma aérea
- INS, GNSS, Pitot, Barômetro, Bússola, Comunicação e processadores;
- Eletrônica aviônica desenvolvida internamente, do projeto da placa ao módulo aviônico completo;
- Arquitetura redundante para segurança de voo;
- Sistemas de potência, condicionamento e monitoramento de energia;
- Atuadores como controladores eletrônicos de velocidade.
Autonomia e controle
- Navegação com três camadas redundantes;
- Replanejamento automático de trajetória, guiamento e controle;
- Inteligência artificial para operação em ambiente com GNSS negado;
- Percepção embarcada com detecção de obstáculos, tráfego aéreo e locais seguros de pouso.
Sistemas de operação
- HMI de planejamento e controle de missão (XCockpit);
- Sistemas UTM para autorização automática de voo (XUTM);
- Plataformas de gestão de frotas (XMRO).

Adicionalmente, para habilitar a operação em um ambiente desestruturado e sem piloto, é necessária a percepção 360 graus do ambiente.

Além disso, o “Xmobots Vision” prevê a operação diurna e noturna e não obstante, ainda deve apresentar robustez à condições meteorológicas adversas como chuva e visibilidade baixa. O sistema de percepção é composto por 23 sensores, sendo câmeras no visível, LWIR (Long Wave Infrared ou Termal), SWIR (Short Wave Infrared) e radares. Essa composição de múltiplos espectros é essencial para operação nas condições meteorológicas do dia a dia da operação.

A tomada de decisão embarcada deve ser abrangente, adaptativa, precisa e segura.
Para tanto, com base nas informações dos sensores de percepção, a Inteligência Artificial embarcada processa:
- Se pode decolar ou pousar onde solicitado pelo usuário, e caso tenha algum obstáculo (galho de arvore, fios) ou risco (animais ou pessoas), o sistema localiza outro ponto próximo que seja seguro para decolagem ou pouso, sendo esta função essencial para permitir a operação fora de aeroportos, helipontos ou “vertiportos”;
- Se em transição de voo vertical e horizontal detectar obstáculos em solo, realiza replanejamento da trajetória de desvio;
- Se em voo horizontal um avião ou drone entrar em rota de colisão, o sistema identifica o objeto conflitante e realiza o replanejamento da trajetória de desvio;
- Se em condição de ataque de hackers, conseguir guiar e navegar com base em geolocalização por imagem mesmo sem comunicação com a central de comando e sem informações do sistema GNSS, que é susceptível à jamming e spoofing.
Adicionalmente, os sistemas aviônicos do Xmobots Vision monitora centenas de parâmetros da aeronave; da corrente, tensão, temperatura vibração, campo magnético gerado pelo motor à deformação e vibração da asa. Todos estes dados são analisados pela IA embarcada que identifica comportamentos anômalos prematuramente, definindo quais subsistemas devem receber manutenção na próxima parada para revisão. Essa tecnologia permite evoluir da:
- Manutenção preventiva tradicional da aviação de helicópteros que representa de 50% a 70% do custo direto da aeronave;
para a:
- Manutenção preditiva, reduzindo para cerca de 20% do custo direto da aeronave, sendo este um dos vetores para tornar a tecnologia mais acessível.
Construir essa base tecnológica levou duas décadas, e essa fundação é imprescindível para habilitar a autonomia e consequentemente retirada do piloto do loop, redução do custo, aumento de acessibilidade e aumento da escalabilidade.
A viabilidade econômica
Um dos objetivos centrais do programa é tornar a mobilidade aérea economicamente acessível.
Atualmente, o custo médio do transporte por helicóptero pode superar US$5 por passageiro por quilômetro, enquanto o UberX no interior do Brasil custa cerca de US$0,28 por passageiro por quilômetro.
A meta do programa é atingir aproximadamente três vezes o custo do UberX, ou cerca de US$0,84 por passageiro por quilômetro, tornando a mobilidade aérea competitiva para diversos usos.

Existem múltiplos cenários onde a mobilidade aérea autônoma regional distribuída é mais eficiente que os métodos tradicionais. Em uma viagem hipotética de São Carlos/SP para o Palácio do Planalto (Brasília), o tempo de 5h25min seria consumido em
transportes de carro e avião, e o custo total da viagem seria de R$ 4,4 mil por pessoa, considerando viagem em dois passageiros.
O “Xmobots Vision” prevê que essa mesma viagem seria realizada em menos tempo, não precisaria trocar de transporte pois decolaria e pousaria dos pontos de origem e destino, custando 35% menos por passageiro, ou seja, R$ 2,9 mil.

Escalabilidade
Para atingir este custo operacional competitivo, já explicamos o impacto da remoção do piloto e tecnologia de manutenção preditiva, que reduzem o custo operacional (OPEX), mas reduzir estes custos é importante, mas não suficiente, é essencial que o custo de implantação (CAPEX) seja o menor possível, tal que reduza ao máximo a característica de operação intensiva em CAPEX, o que é um limitador de crescimento.
Neste sentido, o “Xmobots Vision” foi concebido desde o início para produção em larga escala, incorporado tecnologias amplamente utilizadas em outras indústrias, como a automobilística, e que ganham espaço também no setor aeronáutico.
A plataforma é montada como um “lego de partes pequenas”, permitindo fabricação eficiente, manutenção simplificada e rápida substituição de componentes. As partes são composta por 3 funções principais, estrutural, junção e preenchimento.
- As partes estruturais são fabricadas em perfis de carbono (produzidas em alta escala por máquinas automatizadas);
- As junções são fabricadas em termoplásticos sinterizados em manufatura aditiva e reforços de fibras longas; e,
- O preenchimento é fabricado em polipropileno expandido produzido em injetoras.

Estrutura em treliça de carbono com junções em termoplásticos com fibras longas
Uso dual
A versatilidade tecnológica do programa permite aplicações tanto no setor civil quanto no setor de defesa.
A versão militar da plataforma recebeu a denominação Nauru 3000D, como evolução da família de drones utilizados pelas Forças Armadas Nauru 500C e Nauru 1000C.


“Começamos pelo segmento de defesa porque é onde esse tipo de tecnologia pode ser aplicado de maneira mais imediata e controlada. Cada fase está planejada para gerar aprendizado com experiência de serviço, até que possamos explorar aplicações civis mais amplas”, adiciona o Vice-presidente de Programas da Xmobots, Gabriel Porto.
Para operar como ISTAR, basta instalar a cápsula ISTAR que basicamente é composta pelo tanque de combustível e suporte de sensores de missão. Para operar como transporte de carga, basta instalar a capsula de transporte de carga.
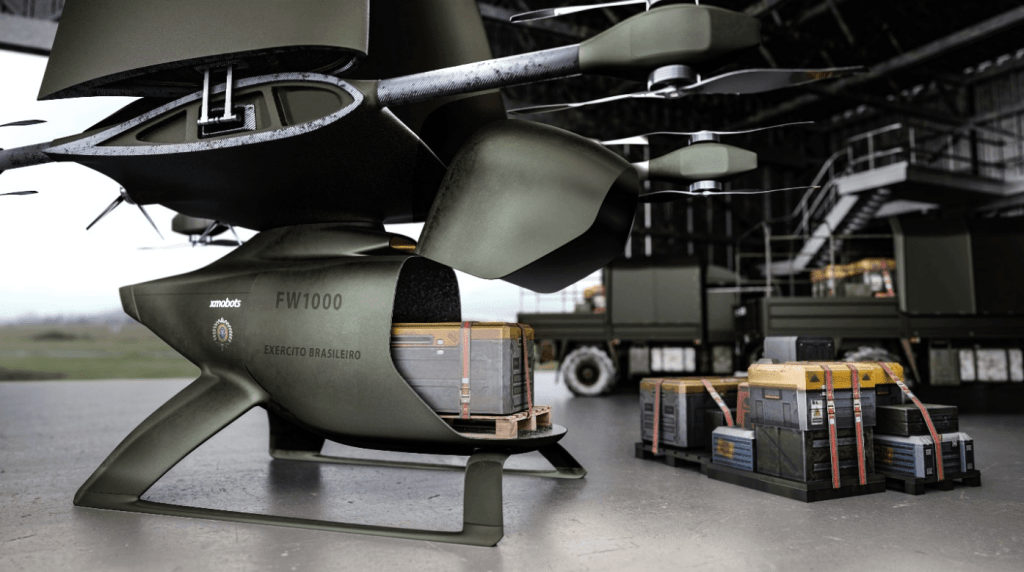
Finalmente, para operar como transporte de tropas, basta instalar a cápsula de passageiros.
No mercado de defesa, o Nauru 3000D surge como uma evolução conceitual do helicóptero militar. Uma pergunta comum é como uma plataforma capaz de transportar apenas dois soldados poderia substituir helicópteros que normalmente transportam 12 ou até 28 militares.
A resposta está na lógica econômica e operacional: tanto no mercado civil quanto no militar, prevalece sempre a solução que cumpre a missão com menor custo e menor risco operacional.
Considerando um cenário de referência — transporte de 28 soldados a uma velocidade média de 262 km/h, operando 300 horas por ano — o Nauru 3000D apresenta um custo total ao longo de 20 anos cerca de 54% inferior ao de um helicóptero equivalente, mantendo a mesma capacidade total de transporte, equivalente a aproximadamente 44 milhões de soldados-quilômetro.
Além da vantagem econômica, o modelo distribuído também aumenta a segurança operacional. Para transportar 28 soldados, seriam utilizados 14 Nauru 3000D, em vez de concentrar todos os militares em um único helicóptero. Dessa forma, o risco deixa de estar concentrado em uma única aeronave, aumentando significativamente a resiliência da operação.

O programa Xmobots Vision
O programa prevê cronograma de oito anos de desenvolvimento progressivo, com seis evoluções, em que cada evolução, tem-se a entrada de um produto ou serviço, até que em 2034 entrará em operação o transporte de passageiros civis.

O programa Xmobots Vision e organizado em 5 grandes fases:
1. Desenvolvimento tecnológico com entrega dos protótipos ISTAR, de carga e de passageiros;
2. Amadurecimento de produto, processo produtivo e certificação RBAC-100;
3. Certificação militar MIL-HDBK-516C subset;
4. Certificação civil RBAC-23/outros e preparação para produção de escala;
5. Entrada em serviço RAAM.
Estamos no meio da primeira fase cujo investimento total (direto e tecnologias correlatas) é de R$282 milhões, parte com o apoio da Financiadora de Estudos e Projetos (FINEP).