Xmobots presents the future of air mobility for passengers and cargo: an innovative program that goes far beyond the concept of the “flying car”
For more than a century, aviation has been built around the presence of human pilots. Aircraft required a trained operator inside the cockpit to manage navigation, decision-making, and flight safety.
- Xmobots Technology: click here to explore Xmobots Vision
Over the coming decades, this paradigm will change. Autonomous systems and artificial intelligence will gradually shift the center of aviation away from human pilots and toward intelligent onboard systems capable of monitoring aircraft, interpreting the environment, and making safe operational decisions in real time.
Xmobots now presents Xmobots Vision — the company’s vision of a future in which aerial mobility becomes personal, accessible, and seamlessly integrated into everyday life.
The initiative represents the development of a new generation of autonomous aerial platforms capable of transporting passengers and cargo regionally in point-to-point operations, without requiring airports or dedicated infrastructure.
More than simply a new aerial vehicle, the program proposes a deeply integrated technological ecosystem, bringing together:
- The aerial platform itself;
- Avionic systems responsible for management, navigation, control, communications, sensing and actuation;
- UTM air traffic management systems.
State-of-the-art:
- Onboard artificial intelligence systems that monitor internal platform health;
- Onboard artificial intelligence capable of continuously monitoring and interpreting the surrounding environment.
This level of technological integration is what enables aerial mobility to become economically viable, scalable, and safe at large scale.
“Xmobots has been developing the enabling ecosystem for autonomous aviation since 2011. Today we have reached the Critical Design Review (CDR) milestone, where the key engineering parameters converge and the program advances to the next stage — the production of the first prototype”, says Giovani Amianti, founder and CEO of Xmobots.
The program accelerates de development in 2024 with support from FINEP (Brazilian Innovation Agency) and the first prototype is expected in 2026.
A New Logic for Air Mobility
Xmobots Vision envisions a future where short and medium-distance air travel occurs door-to-door, defined directly by the user through a digital platform.

The concept enables transportation for two passengers with carry-on baggage, operating in non-shared flights designed according to user demand.
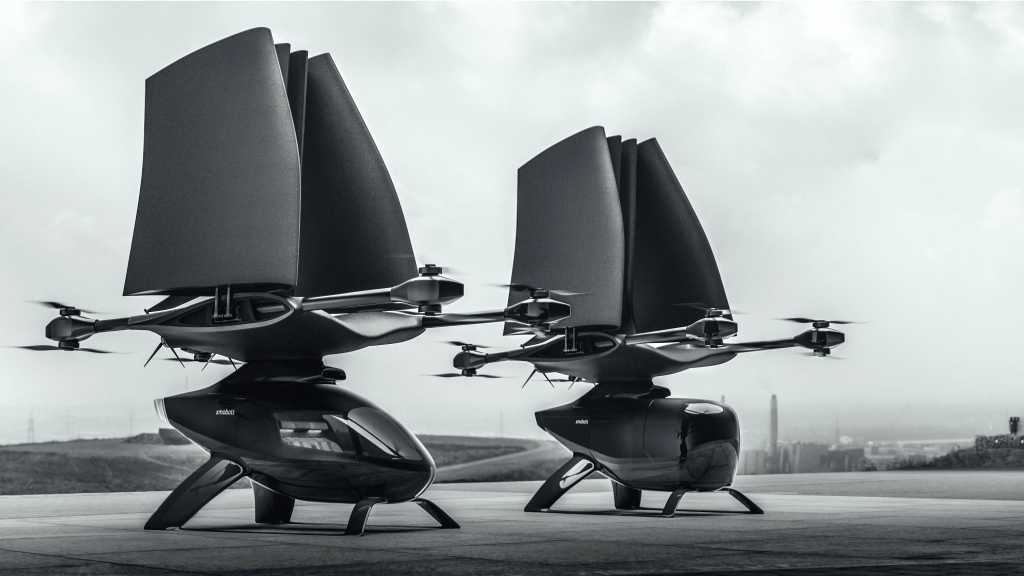
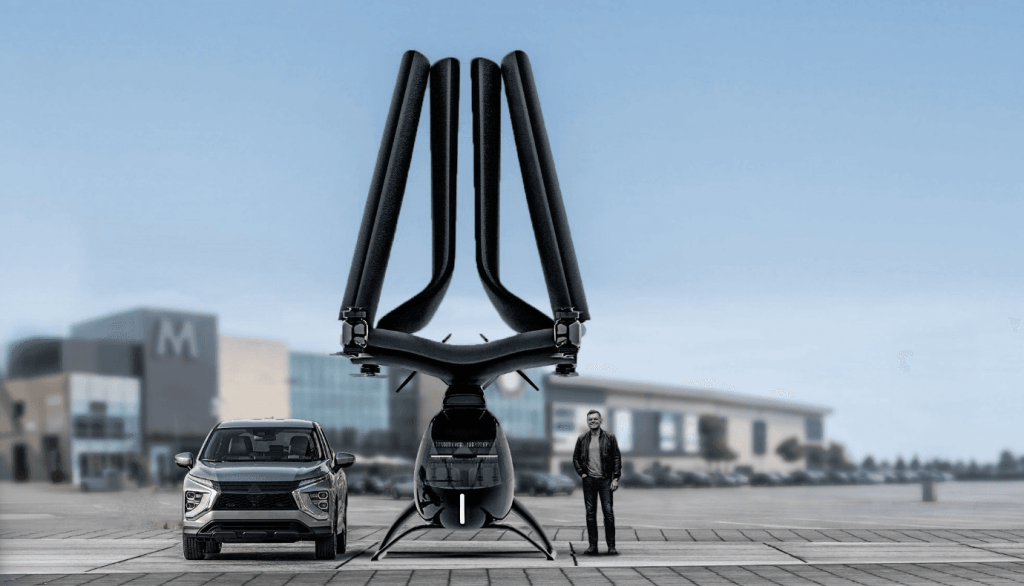
With a range of up to 300 kilometers (186 miles) in approximately two hours, the aerial platform was designed with:
- compact fuselage;
- folding wings;
- elevated VTOL propulsors.
These characteristics allow operations in common urban spaces such as:
- parking areas;
- open urban lots;
- roadside locations.
without requiring airports, heliports, or dedicated vertiports.

“Thinking about the people who live in the interior of Brazil—where distances between cities are large and travel times are long—inspired us to explore a solution capable of drastically reducing that time”, said Daniel Vicentini Lelis, Product Design Manager at Xmobots.
According to him, the proposal is to enable fast travel for a wide range of everyday needs—from business commitments to access to essential services such as healthcare and education.



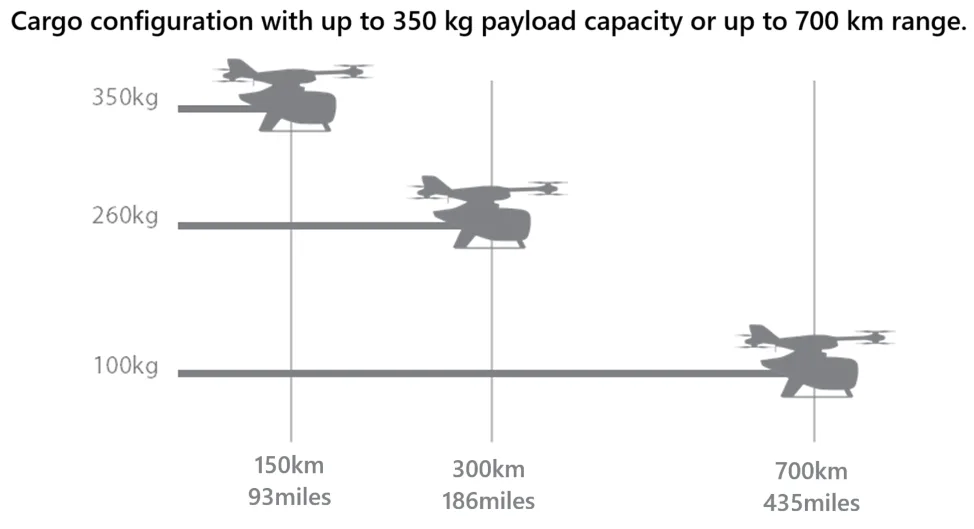
During periods of lower passenger demand — such as overnight hours — the platform can be repurposed for cargo transport, accelerating return on investment and enabling faster fleet renewal cycles that keep pace with the rapid evolution of autonomous robotics.
This versatility, combined with the intelligence embedded within the platform, enables the introduction of a Robots – as – a – Service (RAAS), model, transforming autonomous aviation into a scalable mobility service.
Regional Mobility: A Largely Untapped Market
Most advanced air mobility initiatives currently under development focus on short urban trips, typically between 20 and 50 kilometers, often connecting airports with dense urban centers containing populations of one to three million inhabitants.
Xmobots is pursuing a fundamentally different strategy.
The company focuses on connecting economically productive regions — including agriculture, forestry, mining, energy, oil & gas, and offshore industries — that are often constrained by unsafe or inefficient ground transportation infrastructure.
“The proposal replaces distance, isolation, and terrestrial inefficiency with time. In Brazil, for example, 46% of GDP is generated outside metropolitan areas, largely driven by agribusiness”, says Amianti.


A Global Challenge
Regional mobility limitations are not unique to Brazil.
Similar conditions exist across multiple regions worldwide, including:
- The Midwest and Great Plains in the United States;
- Interior regions of Australia;
- The Argentine Pampas;
- Northern Mexico.
In Canada, vast distances between cities and limited transportation infrastructure create significant mobility challenges.
Across Africa, countries such as South Africa, Kenya, Namibia, Botswana and Nigeria face strong demand for corporate mobility while long distances and unsafe road conditions make ground transportation slow and dangerous.
International organizations such as the OECD and the World Bank, which use the Rural Access Index as a proxy for year-round road accessibility, recognize this limitation as a structural barrier to development.
Distributed aerial mobility has the potential to become a new transportation modality capable of addressing this challenge.
The Market
Market analysis indicates that demand for distributed regional autonomous mobility exists across all five continents.

• ANAC’s pioneering regulatory framework for remotely piloted aircraft;
• strong regional economic activity that will demand such services.
The first economically relevant applications are expected to emerge in:
- 2030 for cargo transport;
- 2034 for passenger transport.
Market projections estimate:
- US$15 billion by 2035;
- US$51 billion by 2040.
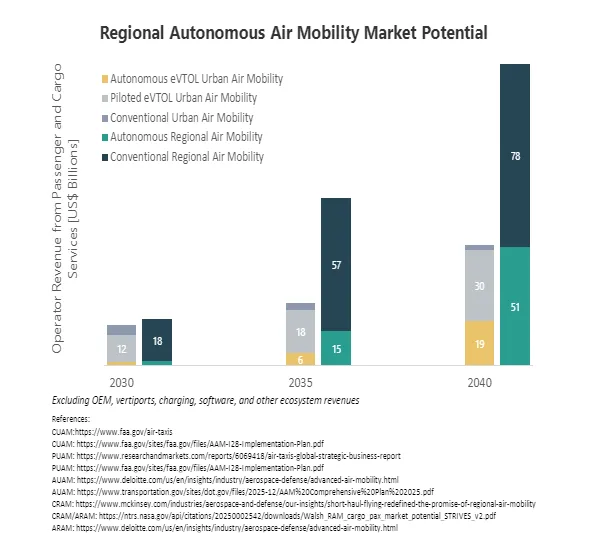
Studies also suggest that the regional autonomous mobility market may be 150% larger than the urban air mobility market, potentially surpassing US$130 billion by 2040.
The Technology
Most advanced air mobility technologies currently focus on vehicles designed to carry 5 to 7 passengers, resulting in aircraft large enough to require dedicated infrastructure such as vertiports, heliports, or airports.
However, studies indicate that the average number of occupants per car is approximately 1.6 people. A platform designed for two passengers can therefore address more than 95% of potential demand. Beyond passenger transport, the platform was designed with a focus on achieving regional mobility ranges of hundreds of kilometers.
To accomplish this, the system uses hybrid electric-combustion energy technology. Take off, cruise and landing are powered by custom electric motors designed by project partner Imobras Motores Elétricos. To overcome the current energy density limitation of batteries — approximately 300 Wh/kg — project partner Giaffone Electric developed a high-performance onboard generator delivering system energy density exceeding 1050 Wh/kg.

This generator can operate on ethanol, enabling carbon-neutral operation.
One of the program’s central challenges was enabling operations wherever a car can operate.
This includes the ability to:
- take off and land from streets
- park in a standard parking space
Engineering solutions enabling this capability include:
- folding wing architecture
- elevated VTOL propulsion systems
The platform integrates seamlessly with existing transportation and fueling infrastructure.
Because it does not rely exclusively on battery charging infrastructure, the platform can travel to the nearest fuel station for refueling.

At the gas station, a standard fuel supply hose is unrolled from the drone and connected to the station’s fuel pump, the same infrastructure used for cars.
A network of certified gas stations will support the operations.

Achieving autonomous aerial mobility requires mastering a Complete Technological Stack .
Few countries possess the capability to develop this entire stack internally.
Xmobots has developed this technology internally over the past two decades.
The system includes:
Avionics and Platform Systems
- INS, GNSS, Pitot, Barometer, Compass, Communications and processors;
- Aviation electronics (avionics) developed internally, from PCB design to the complete avionics module;
- Redundant architecture for flight safety;
- Power systems, conditioning and energy monitoring;
- Actuators such as electronic speed controllers and others.
Autonomy and Control
- Navigation with three redundant layers;
- Automatic trajectory replanning for collision avoidance guidance;
- Precise dynamics identification and robust control with guarantee of convergence to meet certification safety requirements;
- Artificial intelligence enabling operation in GNSS-denied environments;
- Onboard perception systems capable of detecting obstacles, air traffic and safe landing zones.
Operational Systems
- Mission planning and control HMI (XCockpit);
- UTM systems for automated flight authorization (XUTM);
- Fleet management platforms (XMRO).

enables tighter system integration while reducing both cost and weight
Furthermore, to enable operating safely without specialyzed infrastructure and without a pilot requires full 360-degree environmental awareness.

The system uses 23 sensors, including:
- visible spectrum cameras;
- LWIR thermal sensors;
- SWIR sensors;
- radar systems.
This multispectral architecture enables operations under adverse weather conditions including:
- day and night;
- rain;
- fog and or smoke;
- low visibility.

Embedded decision-making must be comprehensive, adaptive, accurate, and safe. Based on sensor data, the onboard AI performs critical decisions such as:
- determining whether takeoff or landing is safe at the requested location;
- selecting alternative landing locations if obstacles such as wires, tree branches, people or animals are detected;
- replanning trajectories to avoid ground obstacles during vertical-horizontal transition;
- detecting and avoiding other aircraft or drones during cruise flight;
- navigating using image-based geolocation in the event of GNSS jamming, spoofing or communication loss.
The avionics system monitors hundreds of parameters, including among others:
- Electrical current and voltage.
(Example: The power consumption of the outer elevon actuator module is within the expected operating range for the current maneuver.)
- Temperature and humidity.
(Example: The temperature of the primary power supply rectifier is within the expected operating range considering the current power demand.)
- Acceleration and rotational speed.
(Example: Vibration levels in VTOL motor 8 are higher than expected. During the 1210-hour inspection, the propeller should be inspected.)
- Magnetic fields.
(Ex.: Magnetic field anomaly detected in cruise motor 2. The aircraft will complete the current mission and return to the nearest MRO center for inspection.)
- Structural deformation.
(Ex.: Critical increase in elastic deformation detected in the wing spar. The aircraft will initiate the VTOL flight termination procedure at the nearest landing site.)
Onboard AI analyzes these parameters to identify anomalies before failure occurs. This enables a transition from:
- traditional preventive maintenance (50–70% of helicopter operating cost);
to:
- predictive maintenance (~20% of Xmobots Vision direct operating cost).
This is one of the key drivers enabling cost reduction.
Civilian Economic Viability
The program aims to make aerial mobility economically accessible.
Current helicopter transport costs exceed US$ 5 per passenger-kilometer.
In comparison, UberX costs approximately US$ 0.28 per passenger-kilometer in Brazil.
The program aims to reach three times the cost of UberX, approximately US$ 0.84 per passenger-kilometer.

For a hypothetical trip between São Carlos (SP) and Brasília, current travel requires:
- 156 km or approximately 2 hours of driving to the airport;
- 1 hour for airport boarding procedures;
- 1.5 hours of commercial flight;
- 30 minutes for baggage claim;
- 25 minutes of local taxi travel.
The result is:
- Total travel time: 5h25;
- Cost: R$ 4,400 per passenger (two passengers).
Using Xmobots Vision, the same trip would be performed:
- Directly from origin to destination;
- With two 20-minute refueling stops;
- Without any transfer between transportation modes.
The result will be:
- 35% lower cost per passenger;
- Final cost: R$ 2,900 per passenger.

Scalability
Achieving competitive returns in air mobility requires reducing both operating costs (OPEX) and capital expenditure (CAPEX). By removing the pilot from the loop and enabling predictive maintenance, Xmobots Vision significantly lowers operating costs. At the same time, the platform is designed for large-scale automated industrial manufacturing, reducing capital intensity compared with traditional aerospace production.
To achieve this, the Xmobots Vision manufacturing architecture draws heavily from automotive production technologies. The structure is built as a modular assembly of small components—similar to a mechanical LEGO system—allowing efficient production, simplified maintenance, and rapid component replacement. Components from “lego” fall into three categories:
Structural components
- carbon structural profiles produced at scale through automated machines
Junction components
- reinforced thermoplastics produced through additive manufacturing
Filling components
- expanded polypropylene produced in industrial injection systems
This architecture enables efficient production and fast component replacement.
An example of the Xmobots Vision engineering philosophy. What initially appeared to be the lowest-cost manufacturing solution—traditional injection molding—proved suboptimal when evaluated at the system level. In aviation, weight is cost. Every additional 10 kgf added to the platform requires approximately 1 kgf of additional propulsion traction, or 100Wh of additional energy capacity. By adopting additive sintering combined with topology optimization, Xmobots engineers were able to drastically reduce structural mass. Although the manufacturing process itself is more expensive, the resulting reduction in energy requirements and propulsion mass generates a larger system economic benefit than the increase in manufacturing cost.

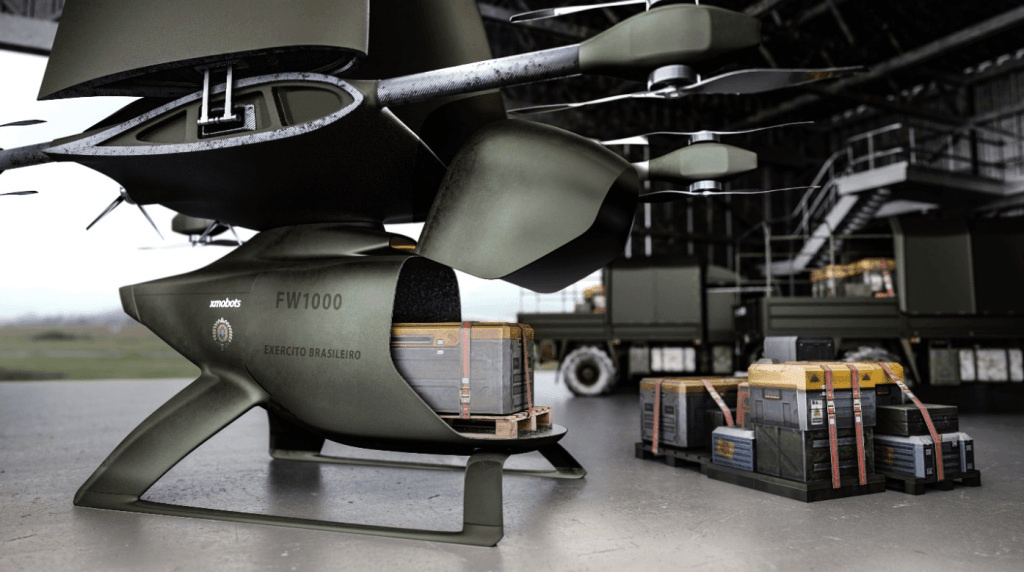
Dual Use Applications
The technology supports both civil and defense applications. The military platform was named as Nauru 3000D, evolving from previous Nauru drone Family Nauru 100D, Nauru 500C and Nauru 1000C.
Mission capsules enable:
- ISTAR operations (aditional fuel tank and payload bay);
- Cargo transport (1m³ cargo bay);
- Troop transport (2-seat cabin).


“Out go to market plan is start with the defense segment because it is where this technology can be deployed sooner and under more controlled conditions. Each phase of the program is designed to generate operational learning through real-world service experience, gradually enabling broader civilian applications”, explains Gabriel Porto, Vice President of Programs at Xmobots.

Military Economic Viability
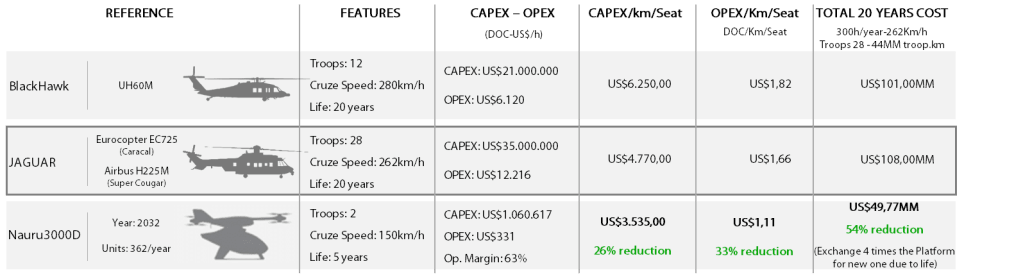
In the defense market, the Nauru3000D represents an evolution of the military helicopter.
A common question arises: how can a platform carrying two soldiers replace helicopters carrying 12–28 troops?
The answer lies in operational economics and distributed risk.
In a scenario transporting 28 soldiers at 262 km/h for 300 hours per year, the Nauru3000D presents:
- 54% lower total lifecycle cost over 20 years;
- equivalent capacity of 44 million soldier-kilometers.
Instead of concentrating risk in one helicopter, the mission would be executed by 14 distributed platforms, increasing operational resilience.
Program Roadmap
The Xmobots Vision program includes 10 years of development (2024-2034) and nine evolutionary stages, culminating in RADAM (Regional Autonomous Distributed Air Mobility) passenger services in 2034.

WFW: With folding wing
RPA: Operação remota com link ponta a ponta ou satelital.
AAI: Autonomous Artificial Inteligence
The Program Xmobots Vision phases include:
- Technology development and prototype tests (ISTAR/CARGO/TROOP);
- Product maturation and RBAC-100 certification;
- Military certification (MIL-HDBK-516C subset);
- RBAC-100 certification including special condition for autonomous flight;
- Civil certification (RBAC-23 + SC-VTOL) and Enterprise services;
- Military certification (MIL-HDBK-516C subset) including special condition for autonomous flight;
- Civil certification (RBAC-23 + SC-VTOL) including special condition for autonomous flight and RADAM service entry.
The total investment in the first phase is R$ 282 million, partially funded by FINEP.