
Do you want to gain productivity and optimize your time in the field?
Anyone who maps sugarcane knows that, in most Brazilian regions, the fields are "chopped up", i.e. located in sparse areas. With this characteristic in mind, XMobots has developed a multi-polygon function in XPlanner (flight plan software). With it, the user can map, in a single flight, a varied number of polygons within a 5km radius approved by ANAC.
How does this benefit your operation?
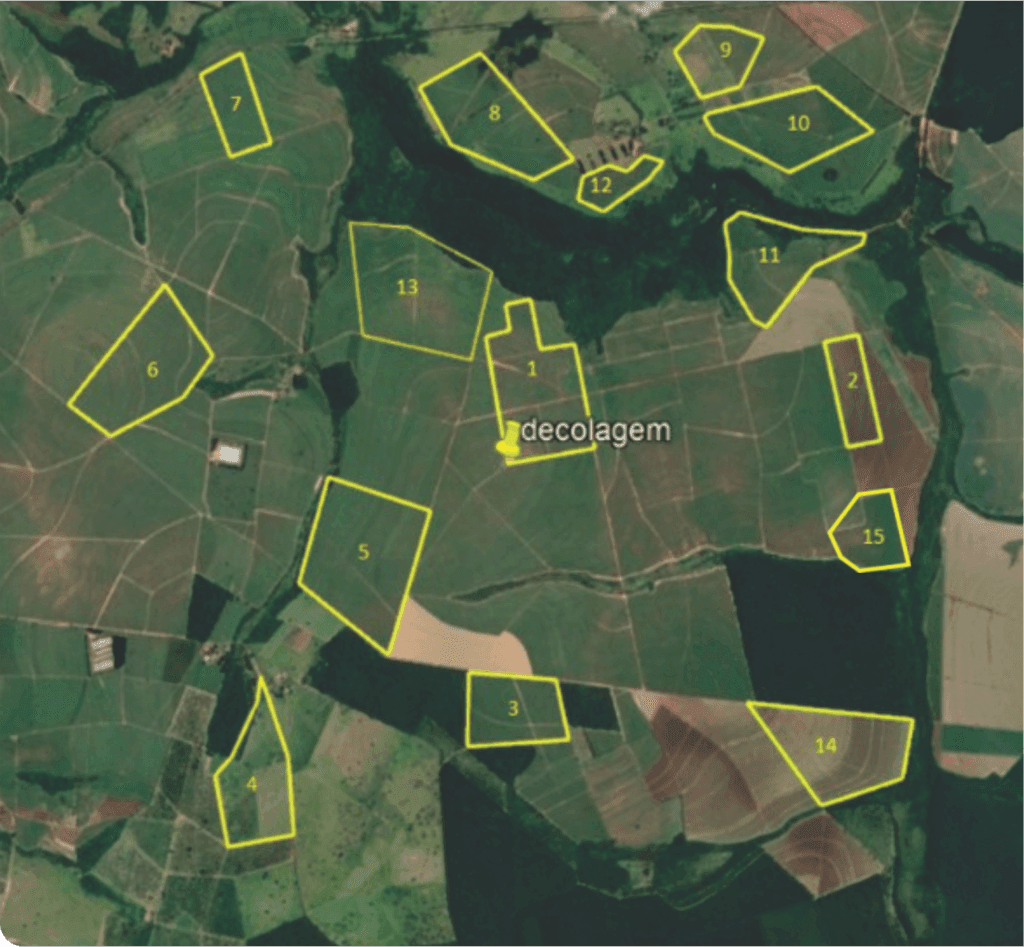
In a recent test carried out by XMobots, comparing the performance of the Arator 5B HAL BVLOS with the RTK multirotor drone, we simulated a day's work for a sugarcane mill pilot. The goal given to the operators of the two pieces of equipment was to map an area of 800 hectares, distributed over 15 plots, arranged within a radius of 5 kilometers.
As this is a precision agriculture application, the flights took place from 9 a.m. to 3 p.m., a period in which the light window guarantees the best imaging results. There was a 1-hour lunch break during this interval.
Both aircraft flew at a height of 120m AGL (Arator GSD 2.5cm | multirotor GSD 3.2cm), with 70% frontal overlap and 60% lateral overlap.
Below is a compilation of the results:
SUMMARY OF THE ARATOR OPERATION:
Area mapped: 797.10 hectares
Polygons mapped: 15
Operating time: 5h
Number of flights: 4
Number of batteries: 4
Total time spent changing batteries (for 15 polygons): 21min 25 sec
Total time spent moving between polygons (for 15 polygons): 0min0sec
SUMMARY OF MULTIROTOR OPERATION
Mapped area: 173.5 hectares
Mapped polygons: 4
Operating time: 5h
Number of flights: 10
Number of batteries: 10
Total time spent changing batteries (for 4 polygons): 21min 25sec
Total time spent moving between polygons (for 4 polygons): 16min 37sec
Do you understand how much more productive the Arator is? If your question is equipment cost and Return on Investment, in the E-book where we detail this test, we give you full access to the ROI spreadsheet for both products.
Access the e-book now(CLICK HERE) and join us!
For more information about XPlanner, visit: https://xmobots.com.br/softwares/xplanner/